Cáp robot công nghiệp: tiêu chí chọn cáp cho cánh tay robot
Chọn sai cáp, cánh tay robot dừng giữa chừng. Tìm hiểu 3 tiêu chí giúp chọn loại cáp phù hợp, giúp hệ thống robot vận hành ổn định, hiệu quả.
Trong mọi hệ thống tự động hoá, từ dây chuyền hàn thân xe đến lắp ráp linh kiện điện tử, cánh tay robot công nghiệp chỉ có thể vận hành chính xác khi nhận được tín hiệu điều khiển và nguồn điện ổn định. Nhiệm vụ truyền tải đó thuộc về một thành phần ít được chú ý nhưng không thể thiếu: cáp robot (robotic cable).
Không đơn thuần là một sợi dây, cáp robot là hệ thần kinh thu nhỏ của cả dây chuyền — bền bỉ dẫn truyền điện năng, tín hiệu và dữ liệu qua hàng chục triệu chu kỳ chuyển động lặp đi lặp lại mỗi ngày.
1. Cáp robot là gì? Tại sao cánh tay robot cần cáp chuyên dụng?
Cáp robot là hệ thần kinh thu nhỏ — bền bỉ dẫn truyền điện năng, tín hiệu điều khiển robot và dữ liệu qua hàng chục triệu chu kỳ chuyển động lặp đi lặp lại mỗi ngày.
1.1 Cáp điện robot là gì?
Cáp robot là dòng cáp điện chuyên dụng được thiết kế để chịu chuyển động liên tục — uốn cong, xoắn, kéo giãn — trong suốt vòng đời của cánh tay robot. Khác với cáp công nghiệp thông thường chỉ cần lắp đặt cố định, cáp robot phải đồng thời truyền tải điện năng, tín hiệu điều khiển và dữ liệu trong khi chuyển động theo quỹ đạo 3 chiều phức tạp — và phải duy trì độ tin cậy đó qua hàng triệu chu kỳ vận hành.
Nếu cáp bị đứt gãy hoặc suy giảm tín hiệu giữa chừng, toàn bộ dây chuyền sản xuất có thể dừng hoạt động. Vì thế, việc lựa chọn đúng loại cáp cho robot không chỉ là bài toán kỹ thuật mà còn là bài toán vận hành dài hạn.
💡 Bạn đang tìm hiểu về cánh tay robot? Xem ngay: Đặc điểm cấu tạo và ứng dụng của cánh tay robot điều khiển
1.2 Cáp điện thông thường vs. cáp robot — điểm khác biệt cốt lõi
Cáp công nghiệp thông thường được thiết kế cho môi trường tĩnh: đi trong ống luồn, máng cáp, hoặc cố định trên tường. Chúng có lõi đồng tiết diện lớn, lớp cách điện PVC cứng, và không cần chịu uốn lặp lại. Cáp robot thì ngược lại — mọi thành phần đều được tối ưu cho chuyển động:
| Tiêu chí | Cáp lắp đặt cố định | Cáp robot chuyên dụng |
| Lõi đồng | Sợi đồng lớn, ít sợi | Sợi đồng siêu mảnh (0.05 – 0.1 mm), bện nhiều sợi tăng độ mềm dẻo |
| Cách điện | Thường là PVC | PUR hoặc TPE — chịu uốn, chống mài mòn, chống dầu |
| Bán kính cong tối thiểu | 10 - 15× đường kính ngoài | 4 - 7.5× đường kính ngoài |
| Tuổi thọ uốn | Không thiết kế cho uốn lặp lại | 5–10 triệu chu kỳ uốn (hoặc hơn) |
| Khả năng xoắn | Không hỗ trợ | ±180°/m liên tục (cáp chống xoắn) |
Sự khác biệt này giải thích tại sao không thể thay thế cáp robot bằng cáp công nghiệp thông thường trong các ứng dụng cánh tay robot — dù chúng có cùng tiết diện và điện áp danh định. Cáp điện thông thường sẽ gãy lõi sau vài nghìn chu kỳ uốn, gây gián đoạn sản xuất và tốn chi phí sửa chữa lớn hơn nhiều lần so với đầu tư cáp đúng loại ngay từ đầu.
Cáp robot gặp nhiều thách thức về mặt cơ học khi sử dụng trong cánh tay robot
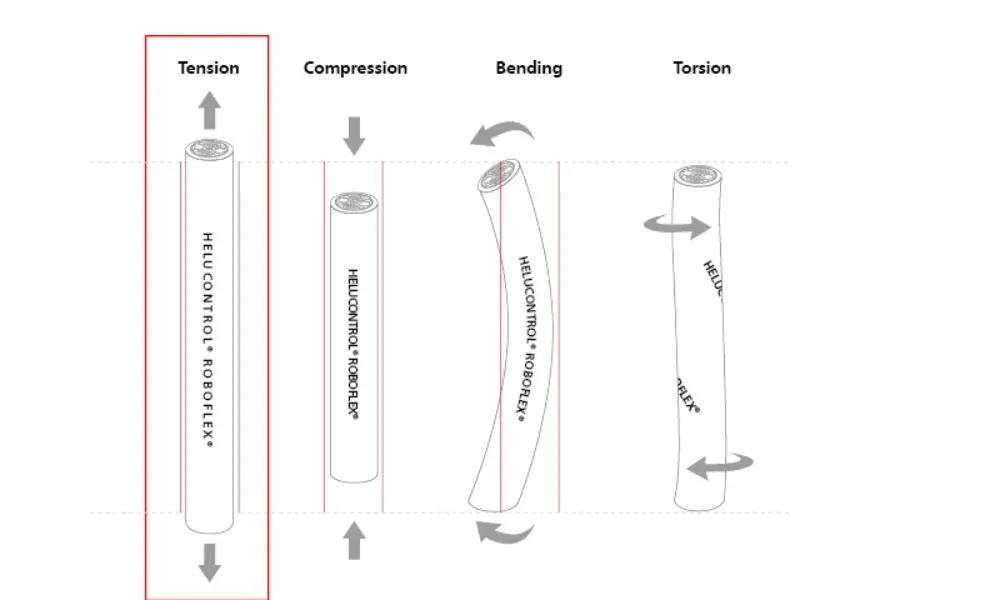
1.3 Top 3 thách thức mà cáp phải chịu trong cánh tay robot công nghiệp
Mỗi cánh tay robot công nghiệp đặt ra ba thách thức cơ học đồng thời lên hệ thống cáp. Hiểu rõ ba thách thức này là nền tảng để lựa chọn đúng loại cáp ở các phần tiếp theo của bài viết.
- Uốn cong liên tục (continuous flexing): Tại mỗi khớp của robot điều khiển, cáp bị uốn đi uốn lại hàng nghìn lần mỗi giờ. Yếu tố quyết định ở đây là bán kính cong (bending radius): cáp phải đủ mềm để uốn qua bán kính nhỏ tại khớp robot mà không bị hư hại. Nếu vượt quá thông số nãy, lõi đồng có thể bị đứt, tín hiệu sẽ nhiễu hoặc mất hoàn toàn.
- Xoắn (torsion): Robot 6 trục (articulated robot) không chỉ uốn mà còn xoay liên tục để định hướng công cụ. Chuyển động xoay này khiến cáp bị xoắn theo cả hai chiều. Nếu cáp không có cấu trúc chống xoắn, các sợi đồng bên trong sẽ bị siết chặt bất đối xứng: một phía bị kéo căng quá mức, phía đối diện bị nén — dẫn đến đứt lõi sớm.
- Lực kéo khi robot di chuyển tốc độ cao (tensile & acceleration forces): Khi cánh tay robot tăng tốc hoặc phanh đột ngột, cáp chịu lực kéo (tensile) và lực quán tính đáng kể — đặc biệt với robot tốc độ cao trong ứng dụng pick-and-place hoặc đóng gói. Ngoài ra, trọng lượng bản thân cáp khi treo tự do cũng tạo lực kéo liên tục tại điểm kết nối. Cáp không đủ khả năng chịu lực sẽ bị giãn dài, biến dạng vỏ, hoặc tệ hơn là tuột ra khỏi đầu nối.
💡Ba thách thức trên dẫn đến ba tiêu chí kỹ thuật cốt lõi khi chọn cáp cho robot: bán kính cong, khả năng chống xoắn, và khả năng chịu lực. Ở các phần tiếp theo, chúng ta sẽ đi sâu vào từng tiêu chí cụ thể.
2. Bán kính cong của cáp – yếu tố quyết định tuổi thọ

Dây cáp điện được kiểm tra khả năng uốn cong trong nhà máy sản xuất của chúng tôi
Bán kính cong là thông số xác định đường cong tối thiểu mà cáp có thể uốn theo mà không ảnh hưởng đến cấu trúc bên trong hoặc hiệu suất truyền tải.
2.1 Tác động khi cáp uốn dưới bán kính cho phép
Với cáp robot sử dụng trong ứng dụng uốn liên tục hoặc hệ thống xích cáp, bán kính cong tiêu biểu nằm trong khoảng 5 đến 10 lần đường kính ngoài của cáp. Uốn cáp quá mức gây ứng suất cơ học lớn lên lõi dẫn và gây ra nhiều hậu quả như:
- Biến dạng vỏ cáp: Phía ngoài cung uốn bị kéo căng, phía trong bị nén.
- Đứt gãy lõi đồng: Các sợi đồng siêu mảnh bên trong chịu ứng suất kéo/nén lặp lại tại điểm uốn. Sau vài nghìn chu kỳ, sợi đồng yếu nhất bắt đầu đứt gãy.
- Suy giảm tín hiệu: Với cáp dữ liệu, lớp chống nhiễu bị biến dạng khiến hiệu quả chắn EMI giảm, ảnh hưởng đến chất lượng truyền tải thông tin, gây sai lệch tín hiệu.
💡 Bạn đã hiểu về thông số bán kính cong của cáp điện chưa? Tìm hiểu ý nghĩa và các yếu tố ảnh hưởng đến bán kinh uốn cong ở cáp điện
2.2 Bảng tra thông số bán kính cong tiêu chuẩn ở các dòng cáp robot
Dưới đây là bán kính uốn cong thực tế của một số dòng cáp robot ROBOFLEX® từ HELU — dữ liệu trích từ datasheet sản phẩm, giúp kỹ sư tra cứu nhanh khi thiết kế hệ thống cáp cho cánh tay robot công nghiệp.
| Dòng cáp ROBOFLEX® | Chức năng | Chuyển động (×D) | Lắp cố định (×D) |
| ROBOFLEX® 2001 / 2001-C | Cáp điều khiển | 7.5 | 4 |
| HELUDATA® ROBOFLEX®-recycle PUR UL/CSA | Cáp sensor & dữ liệu | 10 – 12.5 | 5 |
| HELUPOWER® ROBOFLEX® HYBRID PUR | Cáp động lực (motor / hybrid) | 10 – 12.5 | 5 |
| HELUKAT® 600T CAT.7 PUR TORSION | Cáp Ethernet công nghiệp | 15 | 8 |
Tra cứu thông số bán kính cong
của các dòng cáp xoắn cho ứng dụng robot điều khiển của chúng tôi
3. Đặc tính chống xoắn – giải pháp cho robot 6 trục

Dây cáp điện được xoắn dọc theo trục dọc của chúng bằng thiết bị kiểm tra độ xoắn trong nhà máy sản xuất của HELU
Bán kính cong giải quyết bài toán uốn, nhưng cánh tay robot công nghiệp 6 trục không chỉ uốn — trục cuối (trục 6) còn xoay liên tục để định hướng công cụ. Cáp bên trong phải chịu đồng thời cả uốn lẫn xoắn, và đây là một trong những môi trường khắc nghiệt nhất mà cáp điện có thể gặp.
Cáp điện thông thường có thể chịu xoắn nhẹ khoảng ±30°/m trước khi lớp cách điện bắt đầu biến dạng. Nhưng cáp robot chuyên dụng được thử nghiệm ở mức ±180° đến ±360° mỗi mét, lặp lại hàng triệu lần mà không đứt lõi dẫn điện.
3.1 Cáp chống xoắn là gì?
Cáp chống xoắn (torsion-resistant/ torsion rated cable) là cáp được thiết kế riêng để chịu chuyển động xoay lặp lại quanh trục dọc, thường gặp tại trục 4, 5 và 6 của robot khớp nối. Bốn yếu tố cấu tạo tạo nên khả năng này:
- Bện xoắn đối xứng: Các ruột cáp được bện xen kẽ (cross-lay stranding) quanh lõi trung tâm — triệt tiêu ứng suất xoắn thay vì tích tụ về một phía.
- Lõi trung tâm chịu lực: Đóng vai trò trục xoay (pivot axis), giữ hình học bên trong cân bằng khi cáp xoắn theo cả hai chiều.
- Băng phân tách lớp: Ngăn ma sát giữa các lớp bện khi xoắn.
- Vật liệu PUR / TPE đàn hồi: Duy trì độ đàn hồi dưới chuyển động 3D. PUR kháng dầu, chịu mài mòn; TPE linh hoạt hơn ở nhiệt độ thấp.
3.2 Tác động của lực xoắn lên cáp robot
Cáp xoắn thông thường có thể chịu xoắn nhẹ khoảng ±30°/m trước khi lớp cách điện bắt đầu biến dạng. Nhưng trong cánh tay robot 6 trục, cáp phải chịu xoắn ±180° đến ±360° mỗi mét, lặp lại liên tục. Nếu dùng cáp không thiết kế chống xoắn, một số hư hại dễ gặp phải như sau:
- Vỏ cáp lão hoá nhanh: Xoắn liên tục đẩy nhanh quá trình lão hoá cáp đáng kể. Lớp vỏ ngoài — nơi chịu biến dạng lớn nhất mất đi độ đàn hồi và bị đứt gãy.
- Đứt lõi đồng dẫn điện: Nhiều lực tác động đồng thời lên lõi đồng — kéo, nén, xoắn — khiến các sợi đồng bị mỏi và đứt dần theo thời gian.
- Hỏng tại điểm cố định (fixing point): Đây là điểm yếu thường bị bỏ qua. Các kẹp giữ cáp thông thường không cho phép lực xoắn đi qua — lực dồn nén mạnh tại điểm kẹp tạo ra lực cắt có thể làm đứt cáp ngay tại vị trí cố định. Đây là lý do cáp robot cần dùng đầu kết nối và kẹp chuyên dụng cho ứng dụng xoắn.
- Mất tương thích điện từ (EMC): Nếu dùng C-screen (chống nhiễu thông thường) cho ứng dụng xoắn, lớp bện đồng bị biến dạng vĩnh viễn sau vài nghìn chu kỳ — mất khả năng chắn nhiễu, gây lỗi tín hiệu encoder và bus công nghiệp.
3.3 Tiêu chuẩn thử nghiệm xoắn cho dây cáp robot
Tại nhà máy Windsbach, chúng tôi mô phỏng ứng suất xoắn trong điều kiện thực tế bằng thiết bị thử nghiệm công nghệ cao. Nhiều loại thiết bị khác nhau được sử dụng vì các ngành — đặc biệt ngành ô tô — yêu cầu thông số kỹ thuật rất chính xác về cách tiến hành thử nghiệm. Kết quả thử nghiệm cho từng dòng cáp robot được công bố trên datasheet. Ví dụ với dòng HELUPOWER® ROBOFLEX® HYBRID-D PUR UL/CSA :
| Thông số thử nghiệm của cáp xoắn | Giá trị |
| Bán kính cong khi xoắn | 10 × D (đường kính ngoài) |
| Gia tốc thử nghiệm | 60°/s² |
| Vận tốc thử nghiệm | 180°/s |
| Xoắn ±180°/m | ≥ 10 triệu chu kỳ |
| Xoắn ±360°/m | ≥ 5 triệu chu kỳ |
4. Đặc tính chịu lực – đảm bảo an toàn khi robot vận hành tốc độ cao

Trong các ứng dụng robot điều khiển, cáp xoắn có thể phải chịu gia tốc lên tới 50 m/s² và sự giảm tốc đột ngột, khắc nghiệt (hiệu ứng whiplash)
Uốn và xoắn là hai thách thức cơ học đã phân tích ở phần trước. Nhưng còn một lực thứ ba ít được chú ý hơn: lực kéo (tensile force) tác động lên cáp khi cánh tay robot tăng tốc hoặc phanh đột ngột — đặc biệt ở các ứng dụng tốc độ cao như pick-and-place hay đóng gói.
4.1 Cáp chịu lực là gì? Các lực tác động lên cáp robot
Trong quá trình vận hành, cáp bên trong cánh tay robot công nghiệp chịu đồng thời nhiều loại lực:
- Lực kéo do gia tốc/giảm tốc (hiệu ứng whiplash): Khi robot tăng tốc đột ngột, phần cáp treo tự do bị kéo giãn theo quán tính. Khi phanh, lực dồn ngược lại. Gia tốc có thể lên tới 50 m/s² — tạo lực giật mạnh, lặp lại hàng nghìn lần/giờ. Nếu chọn sai vật liệu, trọng lượng cáp tăng lên trên mỗi mét sẽ làm giảm tuổi thọ cả cáp lẫn hệ thống dress pack.
- Ma sát và mài mòn cơ học: Cáp cọ xát liên tục với cấu trúc robot, ống dẫn cáp, hoặc cáp khác trong cùng bó. Trong môi trường vận hành, cáp còn tiếp xúc với dầu thuỷ lực, dung dịch làm mát, bụi kim loại... Mài mòn vỏ cáp theo thời gian sẽ lộ lớp cách điện — và cuối cùng là lõi đồng.
- Hậu quả đứt cáp: Khi lõi đồng bị đứt một phần do mài mòn hoặc uốn quá tải, dòng điện vốn chạy qua phần bị hỏng sẽ dồn qua các sợi còn lại — mật độ dòng điện tăng, cáp bắt đầu nóng lên, làm hỏng lớp cách điện. Hệ quả có thể là đoản mạch hoặc hồ quang điện — một trong những nguyên nhân gây cháy phổ biến nhất trong nhà máy.
4.2 Vật liệu cáp – Thành phần quyết định khả năng chịu lực của cáp
Vật liệu vỏ cáp quyết định phần lớn khả năng chịu lực, chịu mài mòn, và kháng hoá chất. Dưới đây là so sánh 4 loại vật liệu phổ biến:
| Tiêu chí | PVC | PUR | TPE | FEP/PTFE |
| Nhiệt độ hoạt động | –20 to +80°C | –40 to +125°C | –50 to +125°C | –65 to +250°C |
| Kháng dầu/hóa chất | Trung bình | Xuất sắc | Tốt | Xuất sắc |
| Chịu mài mòn | Thấp | Cao | Cao | Cao |
| Độ bền kéo (tensile strength) | 10 - 25 | 30 – 45 | 20 – 30 | 15 - 25 |
Trong các ứng dụng robot, vật liệu PUR thường được sử dụng phổ biến nhất. Nguyên nhân là vì PUR kết hợp được cả ba yếu tố quan trọng nhất: chịu mài mòn tốt (cáp cọ xát với cấu trúc robot), đàn hồi cao (uốn + xoắn triệu chu kỳ), và kháng dầu/hoá chất (sàn nhà máy có dầu thuỷ lực, dung dịch làm mát, xỉ hàn). PVC rẻ hơn nhưng cứng, dễ nứt khi lạnh và kém bền khi tiếp xúc dầu — chỉ phù hợp lắp đặt cố định.
💡 Bạn đang tìm hiểu về các loại vật liệu ở lớp cách điện và lớp vỏ? Xem ngay đặc tính và sự khác nhau giữa các loại vật liệu
5. Dây cáp chống xoắn HELU cho các ứng dụng cánh tay robot
Thách thức với kỹ sư là phải tìm cáp đáp ứng cả 3 tiêu chí đồng thời — trong khi phần lớn cáp công nghiệp trên thị trường chỉ tối ưu cho 1 hoặc 2 yếu tố. Các dòng cáp chuyên dụng cho ứng dụng robot của HELU được phát triển từ đầu để giải quyết trọn gói bài toán này, với mỗi dòng sản phẩm tương ứng một chức năng khác nhau trong hệ thống robot.
5.1 Tổng quan về dòng cáp ROBOFLEX® của HELU — một giải pháp cho 3 bài toán
ROBOFLEX® là dòng cáp robot chuyên dụng của HELU, được thiết kế và thử nghiệm tại nhà máy Windsbach (Đức) cho các ứng dụng chuyển động phức tạp: robot 6 trục, bàn xoay, hệ thống gantry. Toàn bộ dòng sản phẩm sử dụng:
- Lõi đồng siêu mảnh bện cross-lay stranding — chịu uốn + xoắn đồng thời. Vỏ PUR — kháng dầu, chịu mài mòn, đàn hồi cao.
- D-screen (không phải C-screen) — duy trì EMC khi xoắn.
- Cấu trúc xoắn đối xứng quanh lõi trung tâm chịu lực — triệt tiêu ứng suất xoắn.
Mỗi dòng ROBOFLEX® tương ứng một chức năng trong hệ thống điều khiển robot. Danh mục cáp xoắn ROBOFLEX® bao gồm:
- Cáp điều khiển
- Cáp dữ liệu
- Cáp cấp nguồn động cơ
- Cáp hybrid
- Cáp chống tia lửa hàn


Dòng cáp HELUKAT® SPE Type R 1000BASE-T1 SF/UTP PUR ROBOTIC
5.2 Cáp ethernet và cáp bus cho ứng dụng robot
Các giao thức công nghiệp như PROFINET, EtherCAT, PROFIBUS, SPE đảm bảo vòng điều khiển kín (closed-loop) giữa sensor trên cánh tay robot, bộ điều khiển robot và hệ thống giám sát cấp cao. Cáp dữ liệu Ethernet là "dây thần kinh" thực hiện kết nối này. Một số dòng cáp tiêu biểu như:
- HELUKAT® 100T CAT.5e S/UTP PUR TORSION
- Profibus L2 PUR TORSION
- HELUKAT® 100T CAT.5 SF/UTP PUR TORSION
- HELUKAT® 600T CAT.7 SF/FTP PUR TORSION
- HELUKAT® PROFInet R+ CAT.5e SF/UTP PUR ROBOTIC
Đặc biệt, công nghệ Single Pair Ethernet được khuyên dùng cho các ứng dụng cánh tay robot công nghiệp hay cobot. SPE giúp robot công nghiệp giảm số lượng dây dẫn, giảm kích thước và trọng lượng hệ thống, đồng thời cung cấp băng thông cao, độ trễ thấp và khả năng truyền dữ liệu ổn định trong môi trường nhiễu cao. Ngoài ra, SPE còn hỗ trợ chẩn đoán và bảo trì dự đoán, giúp tăng độ tin cậy và giảm thời gian dừng máy trong các hệ thống robot hiện đại.
💡Tham khảo dòng cáp HELUKAT® SPE Type R 1000BASE-T1 SF/UTP PUR ROBOTIC của chúng tôi

Cáp điện chống xoắn HELUWIND® WK 135-EMV-D-TORSION-MULTI cho tuabin gió
5.3 Các dòng cáp chống xoắn cho ứng dụng tuabin gió của HELU
Robot công nghiệp không phải ứng dụng duy nhất đòi hỏi cáp xoắn. Bên trong tháp tuabin gió, cáp kết nối từ nacelle (vỏ động cơ trên đỉnh tháp) xuống hệ thống điều khiển và lưới điện bên dưới phải chịu ứng suất xoắn liên tục — vì toàn bộ phần đầu tuabin xoay theo hướng gió, trong khi cánh quạt quay tạo mô-men xoắn truyền ngược lên các thành phần bên trong.
HELU cung cấp các dòng cáp chống xoắn chuyên dụng cho tuabin gió — tận dụng cùng công nghệ lõi từ dòng ROBOFLEX® (bện cross-lay, lõi trung tâm chịu lực, vỏ PUR kháng dầu và UV) nhưng được tối ưu cho đặc thù ngành năng lượng gió: điện áp danh định cao hơn, tiết diện lớn hơn cho truyền tải công suất, và khả năng chịu xoắn ở mô-men lớn trong thời gian dài. Các dòng cáp này đáp ứng tiêu chuẩn ngành năng lượng và phù hợp cho cả dự án điện gió trên bờ (onshore) lẫn ngoài khơi (offshore).
Danh mục sản phẩm bao gồm:
6. Hướng dẫn chọn cáp robot cho từng ứng dụng cụ thể
Không có loại cáp nào dùng chung cho mọi robot điều khiển. Mỗi ứng dụng đặt ra tổ hợp yêu cầu riêng về chuyển động, môi trường và tín hiệu. Dưới đây là gợi ý theo 6 nhóm phổ biến nhất.
- Cánh tay robot công nghiệp 6 trục: chịu xoắn ±360°/m kết hợp uốn liên tục. Cần cáp PUR chống xoắn với lõi bện chéo→ Tham khảo các dòng cáp ROBOFLEX® Control / Motor / Sensor, ROBOFLEX® Recycle
- Cobot (pick-and-place, đóng gói, lắp ráp nhẹ): tốc độ thấp nhưng hoạt động cạnh người. Ưu tiên cáp nhẹ, đường kính nhỏ, đủ mềm để không tạo lực cản kích hoạt force error trên khớp. → Tham khảo dòng cáp ROBOFLEX® HYBRID PUR. 💡Bạn đã biết về các ứng dụng của cobot hay chưa? Xem ngay: Đặc điểm, lợi ích và ứng dụng của cobot trong môi trường công nghiệp .
- Robot tuyến tính / Gantry (CNC, cắt laser, vận chuyển tự động): chuyển động thẳng qua lại trong xích cáp, hàng triệu chu kỳ uốn theo một mặt phẳng. Không cần chống xoắn, nhưng đòi hỏi vỏ PUR chịu mài mòn cực cao và cấu trúc ruột dẫn tối ưu cho uốn cong. → Tham khảo các dòng MULTIFLEX 512®-PUR, TOPFLEX® Motor, TOPSERV® Servo.
- Robot y tế / phòng sạch: chuyển động nhỏ, chính xác, nhưng cáp phải chịu tiệt trùng bằng hóa chất hoặc nhiệt và không phát thải hạt. → Tham khảo các dòng cáp không halogen, dòng cáp silicone (–60 °C đến +180 °C).
- Robot ngoài trời / môi trường khắc nghiệt: tiếp xúc trực tiếp UV, mưa, nhiệt–lạnh luân phiên và hóa chất. Cần vỏ PUR kháng UV với lớp bảo vệ bổ sung, đầu nối đạt IP67 trở lên. → Tham khảo Cáp công nghiệp HELU chịu dầu/hóa chất.
- Robot tích hợp vision / AI (lắp ráp dẫn hướng camera, phân loại logistics): yêu cầu truyền dữ liệu tốc độ cao dưới uốn và EMI liên tục. Tham khảo các dòng cáp Ethernet công nghiệp CAT.6A/CAT.7 như HELUKAT® 600T CAT.7 PUR TORSION.
Để chọn được loại cáp phù hợp, cần xác định kiểu chuyển động (xoắn, uốn, hay hỗn hợp) trước, rồi mới xét đến môi trường (nhiệt, hóa chất, UV) và loại tín hiệu điều khiển robot cần truyền. Ba yếu tố này thu hẹp lựa chọn từ hàng trăm mã cáp xuống còn vài dòng sản phẩm — từ đó mới so sánh tiết diện, số lõi và giá.
Nếu bạn cần tư vấn chi tiết theo ứng dụng cụ thể, hãy liên hệ đội ngũ kỹ thuật của HELU Việt Nam để được hỗ trợ.
7. Câu hỏi thường gặp (FAQs)
Tùy dòng cáp và điều kiện lắp đặt. Ví dụ ROBOFLEX® 2001 đạt 7.5×D khi uốn linh hoạt và 4×D khi lắp cố định — thuộc nhóm thấp nhất trên thị trường. Cáp Ethernet HELUKAT® 600T có bán kính uốn cong lớn hơn (15×D). Thông số này có thể được tìm thấy trực tiếp trên datasheet sản phẩm.
Khác hoàn toàn từ cấu trúc bên trong . Cáp thông thường bện lõi tối ưu cho chuyển động một mặt phẳng. Cáp chống xoắn (torsion-rated) dùng cấu trúc bện đặc biệt, lớp lót ma sát thấp (PTFE tape), chống nhiễu kiểu D-screen và vỏ PUR chịu lực — toàn bộ lõi cáp có thể xoắn ±360°/m một cách có kiểm soát mà không hỏng cấu trúc. C-screen (bện đan chéo) hoạt động tốt khi uốn nhưng sẽ đứt khi bị xoắn vì các sợi chéo nhau tạo điểm kẹt.
Được, và sẽ hoạt động rất tốt — vì cáp robot được thiết kế cho điều kiện khắc nghiệt của xích cáp (thêm chống xoắn, chịu lực đa hướng). Tuy nhiên, nếu ứng dụng chỉ cần chuyển động tuyến tính thuần túy, dùng cáp xích cáp chuyên dụng như MULTIFLEX 512®-PUR sẽ tối ưu chi phí hơn.
Có, nếu chọn đúng vật liệu vỏ. PUR chịu dầu khoáng, dầu thủy lực, dung dịch chống bắn xỉ và đa số dung môi công nghiệp — là lựa chọn tiêu chuẩn cho cáp robot. PVC chịu dầu kém hơn đáng kể và giòn dần theo thời gian. TPE nằm giữa, phù hợp khi cần linh hoạt cực cao nhưng tiếp xúc hóa chất ít.
Cáp chịu lực chất lượng cao cho robot được thiết kế cho hàng triệu chu kỳ — nhưng con số cụ thể phụ thuộc vào biên độ. Ví dụ HELUPOWER® ROBOFLEX® HYBRID PUR đạt ≥10 triệu chu kỳ ở ±180°/m và ≥5 triệu chu kỳ ở ±360°/m.
Không nên. Cáp Ethernet CAT.5e/CAT.6 thông thường không được thiết kế cho chuyển động — việc uốn liên tục làm biến dạng lớp chống nhiễu, thay đổi trở kháng và gây suy giảm chất lượng cáp. Robot điều khiển qua mạng Ethernet công nghiệp cần loại cáp chịu uốn/xoắn như HELUKAT® 600T CAT.7 SF/FTP PUR TORSION.
Nếu vẫn còn băn khoăn, đừng quên liên hệ ngay đội ngũ kỹ sư của HELU Việt Nam để được giải đáp chi tiết.
Thông tin liên hệ HELU Việt Nam
| HELU Việt Nam 905 Nguyễn Kiệm, Phường Hạnh Thông, TP. Hồ Chí Minh, 700000, Vietnam | Phone:
+84 28 77755578 Email: info@helukabel.com.vn | Kết nối với chúng tôi trên |
| Đặt hàng qua các kênh trực tuyến của chúng tôi Tiki| Shopee | Lazada | Product finder | ||