Robot cables: How to choose the right cable for robotic arms
Choosing the wrong cable can stop a robot arm mid-cycle. Learn the 3 key criteria for selecting the right cable to keep your robot system running reliably and efficiently.
In every automated system — from car body welding lines to electronics assembly — an industrial robot arm can only operate accurately when it receives stable control signals and power. That transmission job belongs to a component that is often overlooked but absolutely essential: the robotic cable.
A robotic cable is not just a wire. It is the nervous system of the entire production line — reliably carrying power, signals, and data through tens of millions of repeated motion cycles every day.
1. What are robot cables? Why do robotic arms need specialized cables?
Robot cables are like the nervous system of the entire production line — reliably carrying power, signals, and data through tens of millions of repeated motion cycles
1.1 What are robot cables?
A robot cable is a specialized cable designed to withstand continuous motion — bending, twisting, and stretching — throughout the service life of a robot arm. Unlike standard industrial cables that are installed in fixed positions, a robot cable must simultaneously transmit power, control signals, and data while following complex 3D trajectories — and maintain that reliability over millions of operating cycles.
If a cable breaks or signal quality degrades mid-operation, the entire production line can shut down. That is why choosing the right cable for a robot is not just an engineering decision — it is a long-term operational decision.
💡 Are you interested in robotic arms? Check this out: Structural features and applications of robotic arms
1.2 Robot cables vs. normal cables – fundamental differences
Standard industrial cables are designed for static environments: inside conduits, cable trays, or fixed on walls. They use large-diameter copper conductors, rigid PVC insulation, and are not built for repeated bending. Robot cables are the opposite — every component is optimized for motion:
| Criteria | Fixed-installation cable | Robot cables |
| Copper conductor | Large, few strands | Large, few strands |
| Insulation | Usually PVC | PUR or TPE, abrasion-resistant, oil-resistant |
| Minimum bending radius | 10 - 15× outer diameter | 4 - 7.5× outer diameter |
| Flex life | Not designed for repeated bending | 5 – 10 million flex cycles (or more) |
| Torsion capability | Not supported | ±180°/m continuous (torsion-rated cables) |
This difference explains why you cannot substitute a standard industrial cable for a robot cable — even if they share the same cross-section and voltage rating. A standard cable will suffer conductor breaks after just a few thousand flex cycles, causing production downtime that costs far more than investing in the right cable from the start.
Robotic cables face significant mechanical challenges when used in robotic arms
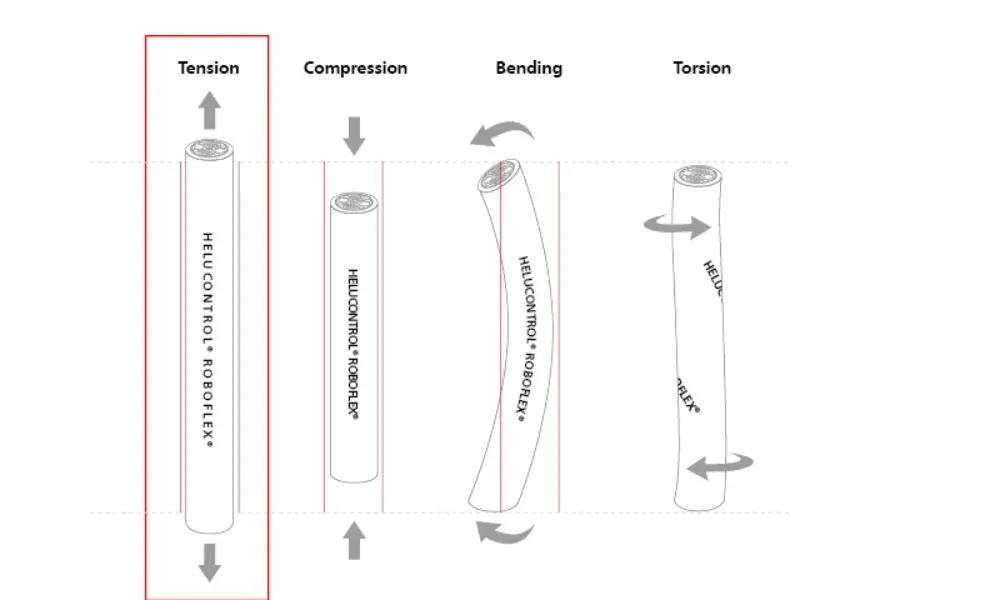
1.3 The 3 challenges every cable faces inside an industrial robot arm
Every industrial robot arm places three simultaneous mechanical challenges on its cable system. Understanding these three challenges is the foundation for selecting the right cable in the sections that follow.
- Continuous flexing: At each robot joint, the cable bends back and forth thousands of times per hour. The critical factor is the bending radius — the cable must be flexible enough to bend around the tight radius at a robot joint without damage. If this limit is exceeded, copper conductors can break and signals may become noisy or lost entirely.
- Torsion: A 6-axis articulated robot does not just bend — it rotates continuously to orient the tool. This rotation twists the cable in both directions. Without a torsion-resistant structure, the internal copper strands get squeezed asymmetrically: one side is over-stretched, the opposite side is compressed — leading to early conductor failure.
- Tensile and acceleration forces: When a robot arm accelerates or brakes suddenly, the cable experiences significant tensile and inertial forces — especially in high-speed pick-and-place or packaging applications. Additionally, the cable's own weight when hanging freely creates a continuous pull at the connection point. A cable that cannot handle these forces will stretch, deform, or even pull free from its connector.
💡These three challenges lead to three core technical criteria when selecting a cable for a robot: bending radius, torsion resistance, and tensile strength. The following sections explore each criterion in detail.
2. Cable bending radius — the factor that determines service life

Electrical cables are tested at our manufacturing facility
The bending radius is the specification that defines the tightest curve a cable can follow without affecting its internal structure or transmission performance.
2.1 What happens when a cable bends below its minimum radius
For robot cables used in continuous flexing or drag chain applications, a typical bending radius is 5 to 10 times the cable's outer diameter. Bending a cable too sharply creates excessive mechanical stress on the conductors and leads to several consequences:
- Cable sheath deformation: The outer side of the bend is stretched; the inner side is compressed.
- Conductor breakage: The ultra-fine copper strands inside experience repeated tension/compression at the bend point. After a few thousand cycles, the weakest strands start to fracture.
- Signal degradation: For data cables, shield deformation reduces EMI shielding effectiveness, affecting data transmission quality and causing signal errors.
💡 Do you want to know more about the bending radius? Understand the meaning and factors affecting the bending radius of cables
2.2 Bending radius reference table for robot cables
Below are actual bending radius values for several ROBOFLEX® robot cable series from HELU — sourced directly from product datasheets to help engineers quickly look up specifications when designing cable systems for industrial robot arms.
| ROBOFLEX® cables | Function | Flexing (×D) | Fixed (×D) |
| ROBOFLEX® 2001 / 2001-C | Control cables | 7.5 | 4 |
| HELUDATA® ROBOFLEX®-recycle PUR UL/CSA | Sensor & data cables | 10 – 12.5 | 5 |
| HELUPOWER® ROBOFLEX® HYBRID PUR | Power cables (Motor / hybrid) | 10 – 12.5 | 5 |
| HELUKAT® 600T CAT.7 PUR TORSION | Industrial ethernet | 15 | 8 |
Look up the bending radius value
of torsion-resistant cables for robotic applications
3. Torsion resistance — the solution for 6-axis robots

Cables and wires are twisted along their longitudinal axis with our torsion testing equipment.
Bending radius solves the bending challenge, but a 6-axis industrial robot arm does more than bend — the last axis (axis 6) rotates continuously to orient the tool. The cable inside must withstand bending and torsion simultaneously, making this one of the harshest environments any electrical cable can face.
A standard cable can tolerate mild torsion of about ±30°/m before the insulation starts to deform. A specialized robot cable, however, is tested at ±180° to ±360° per meter, repeated millions of times without conductor failure.
sted at rates ranging from ±180° to ±360° per meter, repeated millions of times, without the conductive core breaking.
3.1 What are torsion-resistant cables?
Torsion-resistant cables (torsion-rated cables) are specifically designed to withstand repeated rotational movement around its longitudinal axis — typically found at axes 4, 5, and 6 of articulated robots. Four structural elements create this capability:
- Symmetrical cross-lay stranding: Conductor cores are braided alternately around a central element — canceling torsional stress instead of accumulating it on one side.
- Load-bearing central core: Acts as a pivot axis, keeping the internal geometry balanced when the cable twists in both directions.
- Layer seperation tape: Prevent friction between braided layers during torsion.
- PUR/TPE materials: Maintains elasticity under 3D motion. PUR resists oil and abrasion; TPE offers higher flexibility at low temperatures.
3.2 How torsional forces damage robot cables
A standard cable can handle about ±30°/m of twist before the insulation starts to deform. But inside a 6-axis robot arm, the cable must endure ±180° to ±360° per meter, continuously repeated. Using a cable not designed for torsion leads to several types of damage:
- Accelerated sheath aging: Continuous torsion significantly speeds up aging. The outer jacket — where deformation is greatest — loses elasticity and cracks.
- Breakage of the copper conductor: Multiple forces act simultaneously on the copper cores — tension, compression, torsion — causing fatigue and gradual strand breakage over time.
- Failure at the fixing point: This is a commonly overlooked weak point. Standard cable clamps do not allow torsional force to pass through — force concentrates at the clamp point, creating shear stress that can sever the cable right at the fixing location. This is why robot cables require specialized connectors and clamps for torsion applications.
- Loss of Electromagnetic compatibility (EMC): If a C-screen (standard braided shield) is used in a torsion application, the copper braid deforms permanently after a few thousand cycles — losing its shielding capability and causing signal errors in encoders and industrial bus systems.
3.3 Torsion testing standards for robot cables
At the Windsbach plant, we simulate torsional stress under real-world conditions using advanced testing equipment. Multiple types of equipment are used because industries — especially automotive — require very precise specifications for how testing is conducted. Test results for each robot cable series are published on the product datasheet. For example, for the HELUPOWER® ROBOFLEX® HYBRID-D PUR UL/CSA series:
| Parameter | Value |
| Bending radius during torsion | 10 × D (outer diameter) |
| Test acceleration | 60°/s² |
| Test velocity | 180°/s |
| Torsion ±180°/m | ≥ 10 million cycles |
| Torsion ±360°/m | ≥ 5 million cycles |
4. Tensile strength — ensuring safety when robots operate at high speed

In robotic control applications, twisted cables may be subjected to accelerations of up to 50 m/s² and sudden, severe decelerations (the whiplash effect)
Bending and torsion are the two mechanical challenges analyzed in the previous sections. But there is a third, less noticed force: tensile force acting on the cable when the robot arm accelerates or brakes suddenly — especially in high-speed applications like pick-and-place or packaging.
4.1 How do tensile forces affect robot cables?
During operation, cables inside an industrial robot arm are subjected to multiple forces simultaneously:
- Tensile force due to acceleration/deceleration (whiplash effect): When a robot accelerates suddenly, the freely hanging cable section is stretched by inertia. When braking, the force reverses. Acceleration can reach up to 50 m/s² — creating strong jerking forces, repeated thousands of times per hour.
- Friction and mechanical abrasion: The cable rubs continuously against the robot structure, cable guides, or other cables in the same bundle. In the operating environment, cables also come into contact with hydraulic oil, coolant, metal dust, etc. Jacket wear over time exposes the insulation — and eventually the copper cores.
- Consequences of a cable failure: When copper conductors partially break due to abrasion or overbending, current that was flowing through the damaged section is forced through the remaining strands — current density increases, the cable heats up, and insulation degrades. The result can be a short circuit or arc flash — one of the most common causes of factory fires.
4.2 Sheath materials — the component that determines a cable's tensile and wear resistance
The jacket material largely determines a cable's ability to withstand force, abrasion, and chemical exposure. Here is a comparison of the four most common materials:
| Criteria | PVC | PUR | TPE | FEP/PTFE |
| Operating temperature | –20 to +80°C | –40 to +125°C | –50 to +125°C | –65 to +250°C |
| Oil/chemical resistance | Moderate | Excellent | Good | Excellent |
| Abrasion resistance | Low | High | High | High |
| Tensile strength | 10 – 25 | 30 – 45 | 20 – 30 | 15 – 25 |
For robot applications, PUR is the most widely used material because it combines the three most critical factors: high abrasion resistance (cable rubbing against robot structure), high elasticity (millions of flex + torsion cycles), and strong oil/chemical resistance (factory floors with hydraulic oil, coolant, welding spatter). PVC is cheaper but rigid, cracks in cold conditions, and degrades when exposed to oil — suitable only for fixed installations.
💡 Are you looking into the types of materials used in insulation and outer sheath? Check out the characteristics and differences between the various types of materials
5. HELU torsion-resistant cables for robotic arm applications
The challenge for engineers is finding a cable that meets all 3 criteria simultaneously — while most industrial cables on the market are optimized for only 1 or 2 factors. HELU's specialized robot cable series are developed from the ground up to address this complete challenge, with each product line serving a different function within the robot system.
5.1 Overview of the ROBOFLEX® cable series — one solution for 3 challenges
ROBOFLEX® is HELU's specialized robot cable series, designed and tested at the Windsbach facility (Germany) for complex motion applications: 6-axis robots, rotary tables, and gantry systems. The entire product line uses:
- Ultra-fine copper cores with cross-lay stranding — withstands bending + torsion simultaneously. PUR jacket — oil-resistant, abrasion-proof, highly elastic.
- D-screen (not C-screen) — maintains EMC under torsion.
- Symmetrical twist structure around a load-bearing central core — cancels torsional stress.
Each ROBOFLEX® series corresponds to a specific function in the robot control system. The ROBOFLEX® cable catalog includes
- Control cable
- Data cable
- Motor power cable
- Hybrid cable
- Welding spark-resistant cable


HELUKAT® SPE Type R 1000BASE-T1 SF/UTP PUR ROBOTIC Cable Series
5.2 Ethernet and bus cables for robotic applications
Industrial protocols such as PROFINET, EtherCAT, PROFIBUS, and SPE ensure a closed-loop control between sensors on the robot arm, the controller, and higher-level monitoring systems. Ethernet data cables are the "nerves" that make this connection. Key product examples include:
- HELUKAT® 100T CAT.5e S/UTP PUR TORSION – 802186
- Profibus L2 PUR TORSION
- HELUKAT® 100T CAT.5 SF/UTP PUR TORSION – 800067
- HELUKAT® 600T CAT.7 SF/FTP PUR TORSION
- HELUKAT® PROFInet R+ CAT.5e SF/UTP PUR ROBOTIC
In particular, Single Pair Ethernet (SPE) technology is recommended for industrial robot arm and cobot applications. SPE helps industrial robots reduce the number of conductors, reduce system size and weight, while providing high bandwidth, low latency, and stable data transmission in high-interference environments. SPE also supports diagnostics and predictive maintenance, helping increase reliability and reduce downtime in modern robot systems.
💡Check out our cable HELUKAT® SPE Type R 1000BASE-T1 SF/UTP PUR ROBOTIC

HELUWIND® WK 135-EMV-D-TORSION-MULTI torsion-rated cable for wind turbines
5.3 Torsion-resistant cables for wind turbine applications
Industrial robots are not the only application that demands torsion-resistant cables. Inside a wind turbine tower, cables connecting from the nacelle (engine housing at the top) down to the control system and power grid below must endure continuous torsional stress — because the entire turbine head rotates to follow the wind direction, while the rotor blades generate torque that transmits back through the internal components.
HELU supplies specialized torsion-resistant cables for wind turbines — leveraging the same core technology from the ROBOFLEX® series (cross-lay stranding, load-bearing central core, PUR jacket resistant to oil and UV) but optimized for the energy sector: higher rated voltage, larger cross-sections for power transmission, and the ability to withstand torsion at high torque over extended periods. Product examples:
6. How to choose the right robot cable for each application
No single cable works for every robot. Each application presents a unique combination of motion, environment, and signal requirements. Below are recommendations for the 6 most common groups.
- 6-axis industrial robotic arms (welding, palletizing, painting): Must withstand ±360°/m torsion combined with continuous bending. Requires torsion-rated PUR cable with cross-lay stranding. → See ROBOFLEX® Control / Motor / Sensor, ROBOFLEX® Recycle.
- Cobots (pick-and-place, packaging, light assembly): Low speed but operating alongside humans. Prioritize lightweight, small-diameter cables that are soft enough not to create restoring force that triggers force errors on joints. → See ROBOFLEX® HYBRID PUR. 💡Do you know about cobot applications?Check it out now: Features, benefits, and applications of cobots in industrial environments .
- Linear/Gantry Robots (CNC, laser cutting, automated transport): Linear back-and-forth motion in drag chains, millions of single-plane flex cycles. No torsion resistance needed, but requires extremely high abrasion-resistant PUR jacket. → See MULTIFLEX 512®-PUR, TOPFLEX® Motor, TOPSERV® Servo.
- Medical/cleanroom robots: Small, precise movements, but cables must withstand chemical or thermal sterilization and not emit particles. → See HELU halogen-free cables, silicone cable series (–60°C to +180°C).
- Outdoor robots / harsh environments (agriculture, mining, infrastructure inspection): Direct exposure to UV, rain, temperature cycling, and chemicals. Requires UV-resistant PUR with additional protective layers, connectors rated IP67 or higher. → See HELU industrial cables for oil/chemical environments.
- Vision/AI-integrated robots (camera-guided assembly, logistics sorting): Requires high-speed data transmission under continuous flex and EMI. Industrial Ethernet CAT.6A/CAT.7 with multi-layer shielding is mandatory. → See HELUKAT® 600T CAT.7 PUR TORSION.
General principle: First identify the motion type (torsion, bending, or mixed), then consider the environment (heat, chemicals, UV), and finally the signal type needed. These three factors narrow the selection from hundreds of cable part numbers down to a few product lines — from there, compare cross-sections, core counts, and pricing.
If you need detailed advice regarding a specific application, please contact the technical team at HELU Vietnam for assistance.
7. Frequently Asked Questions (FAQs)
It depends on the cable series and installation conditions. For example, ROBOFLEX® 2001 achieves 7.5×D for flexing and 4×D for fixed installation — among the lowest on the market. The Ethernet cable HELUKAT® 600T has a larger bending radius (15×D). This specification can be found directly on the product datasheet.
Completely different in internal structure . A standard cable has cores laid for bending. A torsion-rated cable uses a special cross-lay stranding structure, low-friction PTFE tape wraps, D-screen shielding (spiral-wound, not cross-braided), and a robust PUR jacket — so the entire core bundle can twist ±360°/m in a controlled manner without structural damage. A C-screen (cross-braided shield) works well for bending but will fail under torsion because the crossing wires create pinch points.
Yes, and it will perform very well — because a robot cable outperforms for simple drag chain motion (it additionally handles torsion and multi-directional forces). However, if the application only requires linear motion, using a dedicated cable chain cable like the MULTIFLEX 512®-PUR will be more cost-effective.
Yes, if you choose the right jacket material. PUR resists mineral oil, hydraulic oil, anti-spatter solutions, and most industrial solvents — it is the standard choice for robot cables. PVC has significantly poorer oil resistance and becomes brittle over time. TPE falls in between, suitable when extreme flexibility is needed but chemical exposure is minimal.
High-quality robot cables are designed for millions of cycles — but the specific number depends on the torsion amplitude. For example, the HELUPOWER® ROBOFLEX® HYBRID PUR achieves ≥10 million cycles at ±180°/m and ≥5 million cycles at ±360°/m.
It is not recommended. Standard Ethernet cables (CAT.5e/CAT.6) are not designed for dynamic motion — continuous bending deforms the shield, changes impedance. Industrial Ethernet cables designed for flex/torsion with stable impedance and continuous shielding are required — such as the HELUKAT® 600T CAT.7 SF/FTP PUR TORSION.
If you still have any concerns or questions, don't hesitate to reach out to HELU Vietnam's engineering team promptly for detailed assistance.
Contact Information HELU Vietnam
| HELU Vietnam 905 Nguyen Kiem Street , Hanh Thong Ward, Ho Chi Minh City, 700000, Vietnam | Phone:
+84 28 77755578 Email: info@helukabel.com.vn | Connect with us on |
| Order through our online channels Tiki | Shopee | Lazada | Product finder | ||